Soft Surgical Robot
Autodesk Fusion 360 | 3D-Printing | Mold Design
Arduino | Pneumatic Control Systems
Soft Robotic Actuators
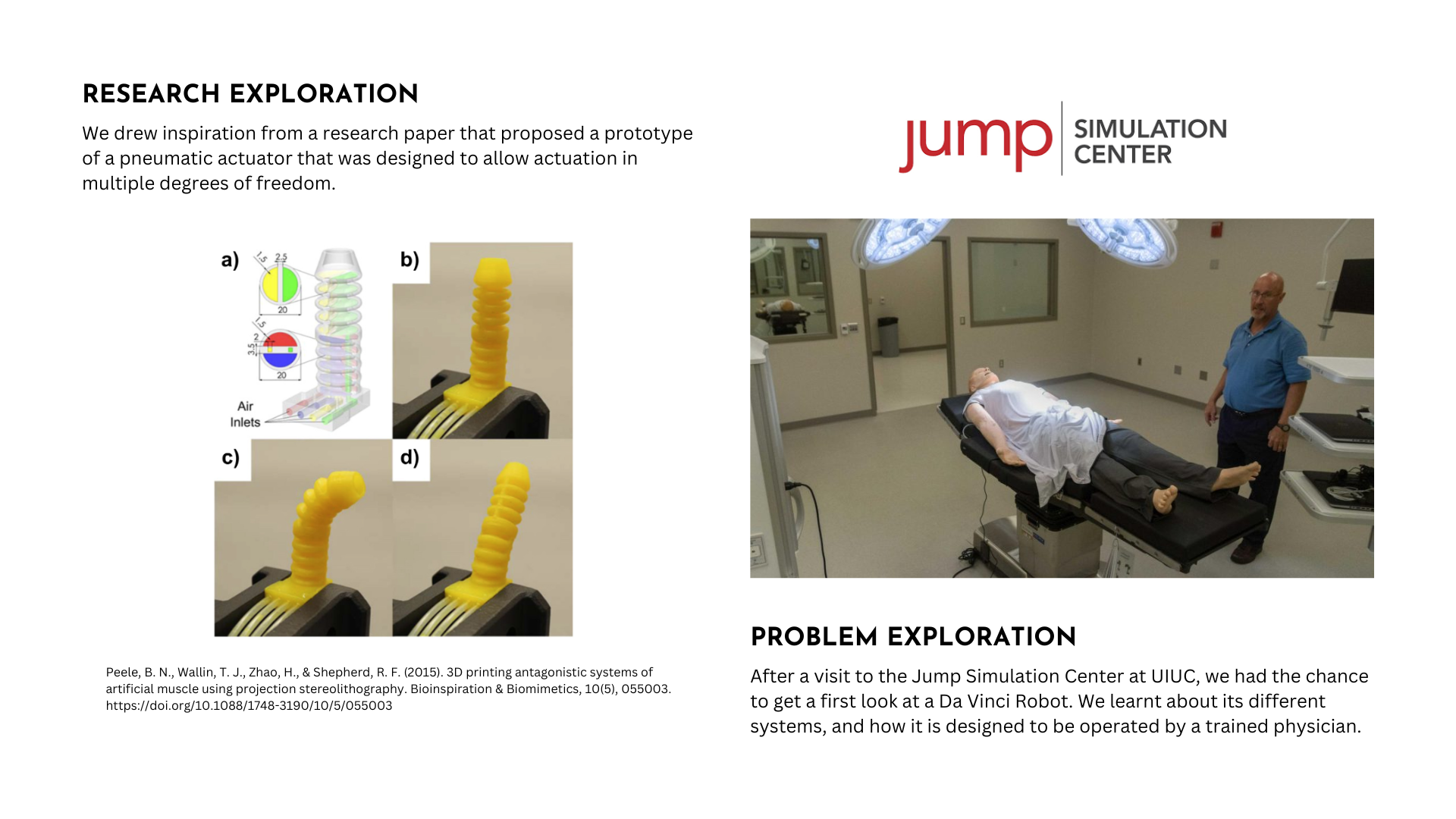
My team and I built a soft surgical robot inspired by Soluble-Insert Actuators as a low-cost alternative to Da Vinci Robots.
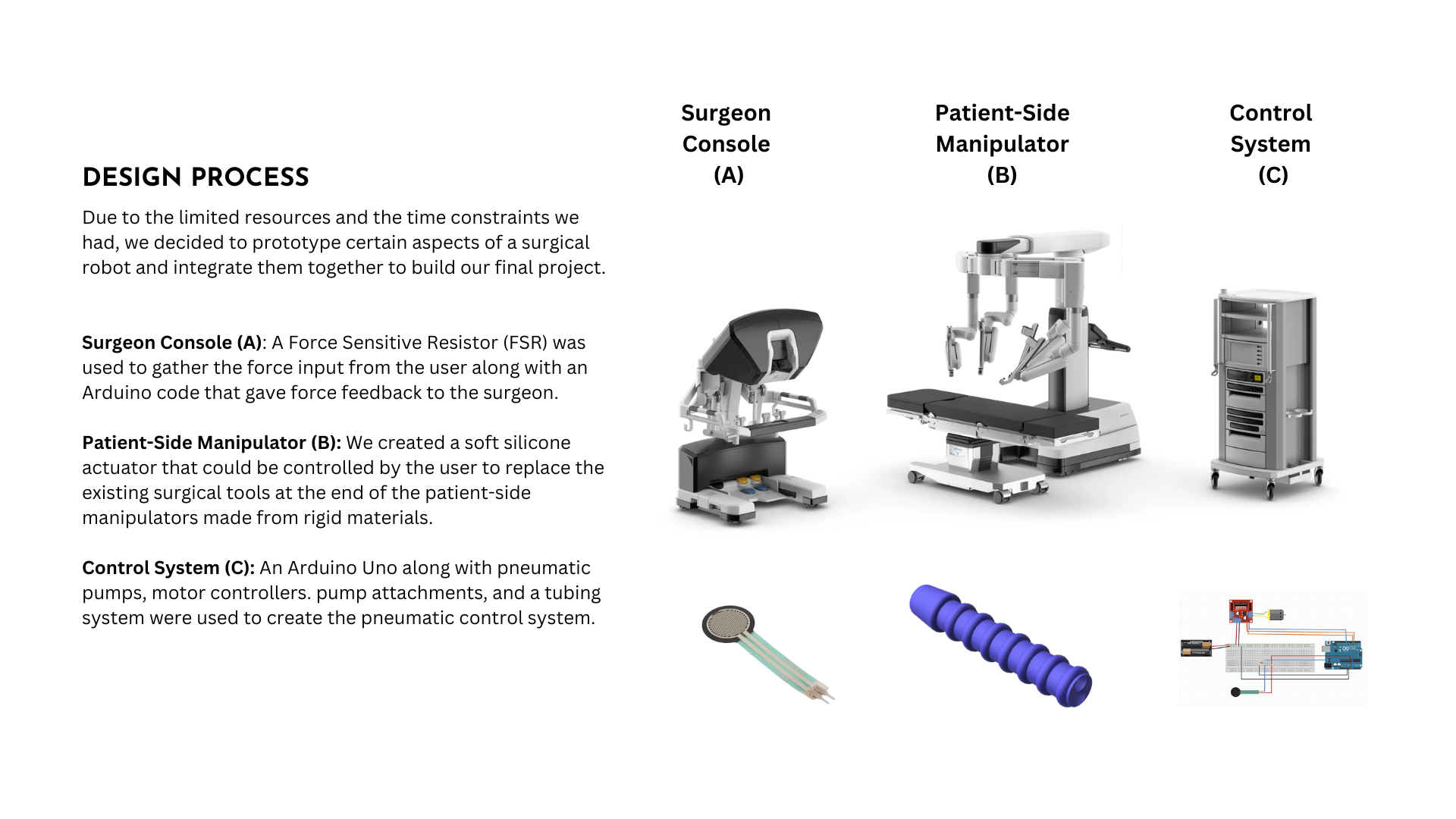
I primarily contributed to the project by designing and prototyping the entire pneumatic control system, modifying the final mold designs, and writing an IEEE formatted project report to be submitted to a Student Design Showcase at the Design of Medical Devices conference.




Project Demos!
Pneunet Design
Pneumatic Control System Design

int fsrPin = 0; // the FSR and 10K pulldown are connected to a0
int fsrReading; // the analog reading from the FSR resistor divider
int motorpin1 = 4; //motor1
int motorpin2 = 5; //motor1
int motorpin3 = 3; //motor2
int motorpin4 = 2; //motor2
int enA = 9; //pwm for motor 1
int enB = 10; //pwm for motor 2
void setup(void) {
// We'll send debugging information via the Serial monitor
Serial.begin(9600);
//setting up the pins from the motor controller
pinMode(motorpin1, OUTPUT);
pinMode(motorpin2, OUTPUT);
pinMode(enA, OUTPUT);
pinMode(motorpin3, OUTPUT);
pinMode(motorpin4, OUTPUT);
pinMode(enB, OUTPUT);
}
void loop(void) {
// read and display analog reading from the Force Sensitive Resistor (FSR)
fsrReading = analogRead(fsrPin);
Serial.print("Analog reading = ");
Serial.print(fsrReading); // the raw analog reading
digitalWrite(motorpin1, HIGH);
digitalWrite(motorpin2, LOW);
int pwmOutput = map(fsrReading, 0, 1023, 0 , 255); //Map the fsr value from 0 to 255
analogWrite(enA, pwmOutput); // Send PWM signal to L298N Enable pin
analogWrite(enB, pwmOutput);
// Feedback to the user based on how hard they press the FSR
if (fsrReading < 10) {
Serial.println(" - No pressure");
} else if (fsrReading < 200) {
Serial.println(" - Light touch");
} else if (fsrReading < 500) {
Serial.println(" - Light squeeze");
} else if (fsrReading < 800) {
Serial.println(" - Medium squeeze");
} else {
Serial.println(" - Big squeeze");
}
delay(1000);
}