Golecki Group - Soft Robotics Lab
Undergraduate Research Assistant
Mechanical Design | Pneumatic Actuators
Soft Robotics | Engineering Materials
Materials Testing | Rapid Prototyping
I conducted research with Dr. Holly Golecki on using soft robotics to improve the affordability and accessibility of medical simulation tools.
Some of the topics/concepts I researched:
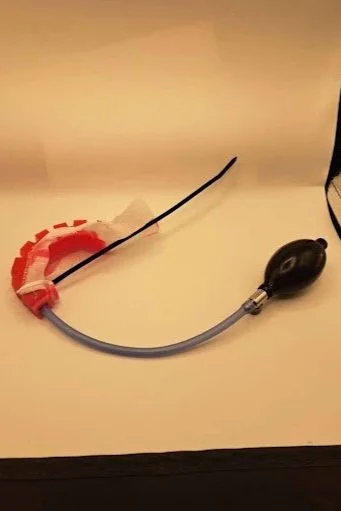
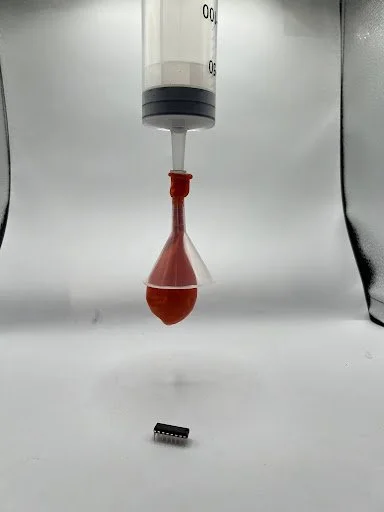
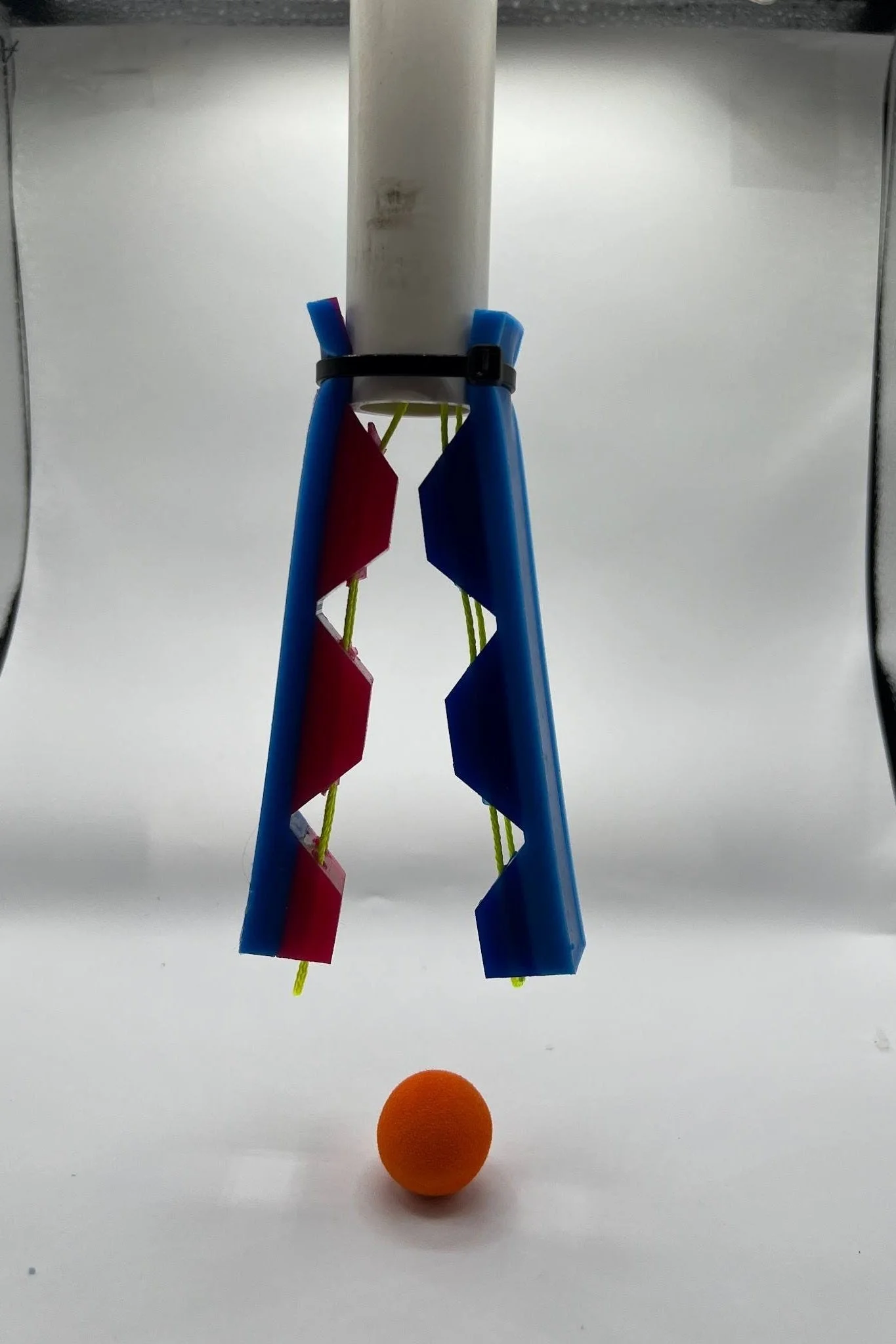
Applications for pneumatic biopolymer soft robots and actuators for creating low-cost, high-fidelity medical task trainers.
Exploring gelatin’s unique material properties to support it as a candidate for fabricating task trainers with increased fidelity.

I was recently invited to present my published research paper - “Gelatin Material Properties and Their Role in Increasing Task Trainer Fidelity” - at the Design of Medical Devices Conference in Minnesota!
The feedback we got from medical device professionals on exploring thermal integrations to mimic body heat and creating anisotropic properties in gelatin-based task trainers will serve as a great foundation to improve the fidelity, accessibility, and affordability of medical simulation tools.
Paper Link: https://asmedigitalcollection.asme.org/BIOMED/proceedings/DMD2025/88735/V001T06A010/1218612